플레이어 상태 관리, 자료구조를 좀 더 활용해볼걸
1. 기존 FSM 방식
기존 FSM을 구현할 때에는 각 상태 안에 종료 조건과, 종료 시 이동할 상태에 대한 로직을 함께 포함시켰다.
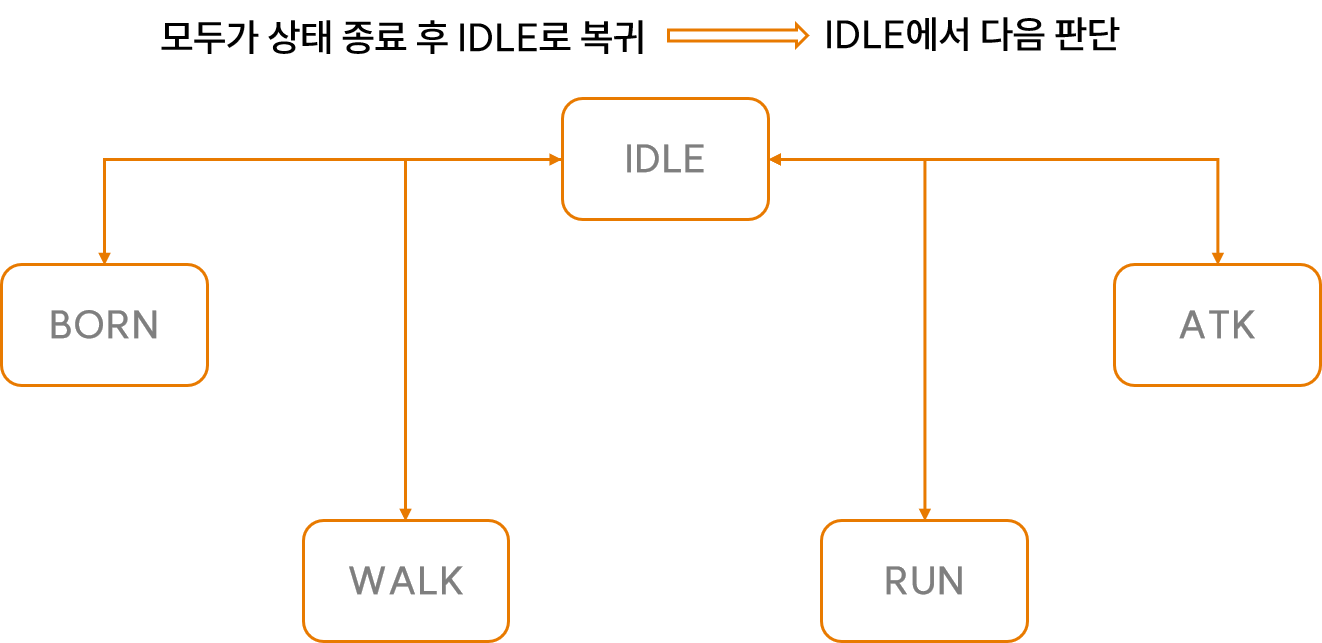
다만 이 방식은 상태가 늘어날수록 전이 로직이 여기저기 흩어지는 문제가 생겼다. 이를 막기 위해 모든 상태가 일단 IDLE로 복귀한 뒤, IDLE에서 다음 상태로의 전이 조건을 한곳에서 판단하는 방식을 택했다. 전이 로직을 한 곳에 모을 수 있다는 점에서 관리가 편했다.
하지만 이 구조도 상태가 많아지면 한계가 드러났다. IDLE에 전이 조건이 쌓이기 시작했고, 특정 상태를 수정하면 그 상태의 전이 조건을 참조하던 다른 상태가 영향을 받았다. 상태들이 서로를 암묵적으로 알고 있는 구조였던 것이다.
장점: 구조가 명확하고 초기 구현이 쉽다. 단점: 상태가 늘어날수록 전이 조건이 복잡하게 얽히고, 한 상태의 수정이 다른 상태에 예상치 못한 영향을 준다.
2. HFSM과 LayeredFSM으로의 전환
상태가 늘어나면서 단일 FSM만으로는 한계가 왔다. 전이 조건이 복잡하게 얽히는 문제를 구조적으로 풀기 위해 두 가지 접근을 함께 검토했다.
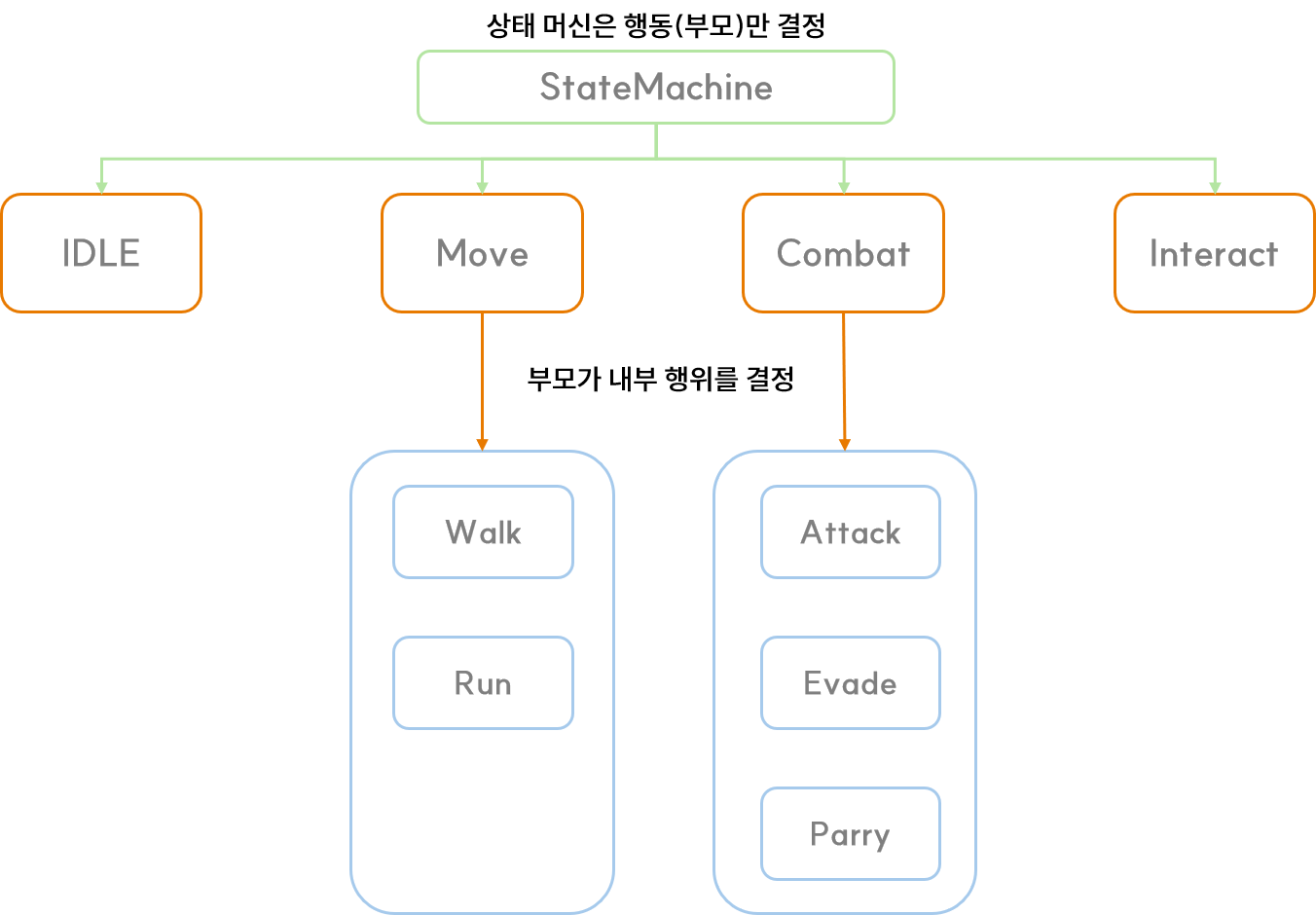
HFSM(Hierarchical FSM) 은 상태를 계층으로 묶어, 상위 상태가 하위 상태를 포함하는 방식이다. Layered FSM 은 이동 레이어, 전투 레이어처럼 관심사가 다른 FSM을 레이어 단위로 분리한다. 운영체제의 프로세스와 스레드 관계를 참고했다. 프로세스가 독립적인 실행 단위를 가지듯, 레이어마다 독립적인 상태 흐름을 두고 — 스레드가 프로세스 안에서 동작하듯, 각 레이어 안에서 세부 상태가 동작하는 구조다.
이를 바탕으로 행위(what to do)와 행동(how to do it)을 분리하는 방향으로 가닥을 잡았다. 특정 행동을 수행하는 상황에서 취해야 할 세부 행동을 부모→자식 관계로 구성하고, 레이어를 나눠 표정, 애니메이션, 그 외 상태들을 병렬로 관리하려 했다.
카테고라이징이 명확해지면서 상태 간의 우선 관계와 상하 관계 파악은 훨씬 쉬워졌다. 같은 부모 안에서의 자식 전이, 같은 레이어 안에서의 상태 전이는 간단한 조건으로도 깔끔하게 처리됐다.
3. 그래도 남아있던 한계
계층과 레이어로 묶는 문제는 풀었지만, 상태들 사이를 가로지르는 문제는 여전히 남아 있었다.
가장 큰 원인은 “이 상태가 끝나면 어디로 돌아가는가”를 각 상태가 직접 알고 있어야 한다는 점이었다. 공격 도중 피격이 발생하면, 피격 상태는 종료 시 공격 상태로 복귀하는 경로를 명시적으로 알고 있어야 했다. 계층이 깊어질수록 이런 참조가 늘어났고, 수정 시 영향 범위를 파악하기가 1챕터보다 오히려 더 어려운 경우도 생겼다.
새로운 상태가 추가될 때마다 기존 상태들과의 전이 조건을 다시 검토해야 했고, 그럴수록 조건문과 상태 체크는 계속 쌓였다.
자료구조의 특성을 활용해보기
문제를 다시 정리하니 두 가지였다.
하나는 상태 복원 문제다. 어떤 상태가 끝났을 때 어디로 돌아가야 하는지를, 각 상태가 직접 알고 있어야 했다.
다른 하나는 상태 선정 문제다. 지금 어떤 상태가 실행되어야 하는지를, 개발자가 간선을 직접 연결하는 방식으로 지정해주고 있었다.
이 두 문제를 각각 스택과 우선순위 큐로 접근해보면 어떨까 생각했다. 상태가 “다음에 어디로 가야 하는지”를 아는 대신, 구조 자체가 그것을 결정하도록 책임을 넘기는 방식이다.
5. 스택으로 상태 복원 관리하기
스택 기반 상태 복원
상태 전환이 발생할 때 상태 자체를 스택으로 관리하는 방식이다. 새로운 상태가 들어오면 push, 현재 상태를 빠져나가면 pop.
이 구조가 빛을 발하는 상황이 있다. 공격 자세를 잡고 0.2초 후 공격이 진행되려는 찰나, 피격이 발생했다고 하자. 기존 방식이라면 공격 → 공격 종료 → 아이들 → 피격 → 밀림 순서로 상태를 하나씩 거쳐야 했다. 문제는 이 과정에서 공격 상태 진입 시 설정해둔 애니메이션이나 사운드 값들이 중간에 남아버리는 경우가 생긴다는 것이다. 특히 강제 전환 설정이 걸려 있다면 더욱 골치 아파진다.
스택 방식이라면 중간 상태를 모두 건너뛰고 원하는 상태를 바로 덮어씌울 수 있다. 그리고 해당 상태가 끝나면 pop을 통해 이전 상태로 자연스럽게 복귀된다. 각 상태가 “끝나면 어디로 가야 하는지”를 알 필요가 없다.
다만 실제 구현을 고민하다보니 생각이 좀 바뀌었다.
pop 타이밍 문제
pop 타이밍을 해결하기 위해 두 가지를 생각해봤다.
첫 번째는 push되는 상태와 현재 top 상태를 비교해 pop 여부를 판단하는 방식. 두 번째는 각 상태에 자동 소멸 조건을 부여해 스택이 알아서 꺼내는 방식.
첫 번째는 문제를 해결하려다 동일한 문제가 반복됐다. 상태끼리 서로를 알아야 한다는 구조가 다시 생겼다. 두 번째는 되려 더 복잡하고 성능 손해가 생길 것 같았다.
인터럽트 상태와 노멀 상태의 분리
그래서 방향을 바꿨다. 스택을 활용해 상태를 덮어쓰는 방식 자체는 유효하다. 문제는 모든 상태에 적용하려 했다는 것이었다.
상태를 방해할 수 있는 상태(Interrupt State) 와 방해할 수 없는 상태(Normal State) 를 구분한다. 스테이트 머신은 두 개의 컨테이너를 가진다. 매 프레임 인터럽트 스택을 먼저 확인하고, 비어있으면 노멀 상태를 실행한다.
pop 타이밍 문제도 이 구조에서는 자연스럽게 풀린다. 인터럽트 상태는 대부분 명확한 종료 시점을 가지고 있기 때문이다. 피격 모션이 끝나면 끝, 경직이 풀리면 끝. 상태가 스스로 완료 신호를 보내고 pop되는 방식이 인터럽트 상태의 성격과 잘 맞아 떨어진다.
 이 구조가 유효한 또 다른 케이스가 있다. 동물의 숲류 게임에서 NPC와의 대화 → 선물 건네주기 → 다시 대화 시작 같은 흐름이다. 기존 방식이라면 대화 종료 후 어디로 돌아가야 하는지를 선물 상태가 직접 알고 있어야 했다. 인터럽트 스택을 쓰면 대화 위에 선물 상태를 push하고, 선물이 끝나면 pop— 자연스럽게 대화로 복귀된다. 상태가 "돌아갈 곳"을 알 필요가 없다.
이 구조가 유효한 또 다른 케이스가 있다. 동물의 숲류 게임에서 NPC와의 대화 → 선물 건네주기 → 다시 대화 시작 같은 흐름이다. 기존 방식이라면 대화 종료 후 어디로 돌아가야 하는지를 선물 상태가 직접 알고 있어야 했다. 인터럽트 스택을 쓰면 대화 위에 선물 상태를 push하고, 선물이 끝나면 pop— 자연스럽게 대화로 복귀된다. 상태가 "돌아갈 곳"을 알 필요가 없다.
구현 예시
cpp
class IState
{
public:
virtual ~IState() = default;
virtual void Enter() = 0;
virtual void Update(float deltaTime) = 0;
virtual void Exit() = 0;
virtual bool IsDone() const = 0; // 상태 완료 여부
};
class StateMachine
{
public:
// 노멀 상태 교체
void SetNormalState(IState* state)
{
if (normalState) normalState->Exit();
normalState = state;
if (normalState) normalState->Enter();
}
// 인터럽트 상태 push
void PushInterruptState(IState* state)
{
if (!interruptStack.empty())
interruptStack.top()->Exit();
interruptStack.push(state);
state->Enter();
}
void Update(float deltaTime)
{
// 인터럽트 스택 먼저 확인
if (!interruptStack.empty())
{
IState* top = interruptStack.top();
top->Update(deltaTime);
// 완료되면 알아서 pop
if (top->IsDone())
{
top->Exit();
interruptStack.pop();
// 아래 인터럽트 상태가 있으면 재진입
if (!interruptStack.empty())
interruptStack.top()->Enter();
}
return;
}
// 인터럽트 없으면 노멀 상태 실행
if (normalState)
normalState->Update(deltaTime);
}
private:
IState* normalState = nullptr;
std::stack<IState*> interruptStack;
};6. 우선순위 큐로 상태 선정 자동화하기
다음 문제는 상태 간의 간선을 직접 이어주는 방식이었다. 개발자가 “A 상태에서 B 상태로”를 일일이 연결해주는 대신, 데이터나 사전 설정에 따라 자연스럽게 흘러가는 구조를 만들고 싶었다.
그 와중에 떠오른 것이 윈도우의 메시지 큐 구조였다. 윈도우가 메시지를 직접 처리하는 대신 큐에 밀어넣고 순서대로 소화하듯, 상태 전환도 요청을 큐에 넣는 방식으로 바꾸면 어떨까.
기존 구조의 문제는 명확했다. 동일한 조건에서 두 개의 상태가 중복으로 전이 요청을 하면, 영문 모를 행동이 발생하기도 했다. 각 상태가 서로의 전환을 직접 건드리다 보니 생기는 문제였다.
새로운 구조에서는 각 상태는 그저 본인이 원하는 상태로의 전이 요청을 큐에 넣을 뿐이다. 실제로 어떤 요청을 처리할지는 스테이트 머신이 결정한다. 여기에 우선순위를 부여해, 더 중요한 요청이 먼저 처리되도록 한다.
또한 PeekMessage처럼 현재 전환이 불가능한 상태라면, 들어오는 요청을 전부 비우는 방식으로 처리해도 무방하다. 처리할 수 없는 요청이 쌓여 나중에 오작동하는 것을 막을 수 있다.
 이 구조의 장점은 다음과 같다.
이 구조의 장점은 다음과 같다.
- 중복 전이 문제 해소 — 상태를 병렬로 돌려도 요청이 큐를 통해 일원화되므로 중복 처리 확률이 낮아진다.
- 병렬 상태 간 안전한 간섭 — 도구 상태가 “도구를 든 걸음으로 바꿔줘”하고 움직임 상태에 요청하는 것처럼, 서로 직접 건드리지 않고 요청만 던지는 방식으로 안전하게 상호작용할 수 있다.
- 외부에서의 상태 전환이 편해진다 — “현재 대화 상대를 대화 상태로 전환시켜줘”처럼 외부 시스템에서 상태 전환을 요청하기가 매우 쉬워진다.
enum class StatePriority
{
Low = 0,
Medium = 1,
High = 2,
Critical = 3
};
enum class StateType
{
Normal,
Interrupt
};
struct StateRequest
{
std::string stateId;
StateType type;
StatePriority priority;
bool operator<(const StateRequest& other) const
{
return priority < other.priority;
}
};
class IState
{
public:
virtual ~IState() = default;
virtual void Enter() = 0;
virtual void Update(float deltaTime) = 0;
virtual void Exit() = 0;
virtual bool IsDone() const = 0;
virtual bool CanTransition() const = 0; // 전환 가능 여부
};
class StateMachine
{
public:
void RegisterState(const std::string& id, std::unique_ptr<IState> state)
{
stateRegistry[id] = std::move(state);
}
// 외부에서 요청 밀어넣기
void RequestState(const std::string& stateId,
StateType type,
StatePriority priority = StatePriority::Medium)
{
requestQueue.push({ stateId, type, priority });
}
void Update(float deltaTime)
{
ProcessRequests();
ExecuteCurrentState(deltaTime);
}
private:
void ProcessRequests()
{
while (!requestQueue.empty())
{
StateRequest request = requestQueue.top();
requestQueue.pop();
IState* current = GetCurrentState();
// PeekMessage식 flush — 전환 불가 상태면 요청 전부 버림
if (current && !current->CanTransition())
{
while (!requestQueue.empty()) requestQueue.pop();
return;
}
if (request.type == StateType::Interrupt)
PushInterrupt(request.stateId);
else
SetNormal(request.stateId);
}
}
void ExecuteCurrentState(float deltaTime)
{
// 인터럽트 스택 먼저 확인
if (!interruptStack.empty())
{
IState* top = interruptStack.top();
top->Update(deltaTime);
if (top->IsDone())
{
top->Exit();
interruptStack.pop();
if (!interruptStack.empty())
interruptStack.top()->Enter();
}
return;
}
// 비어있으면 노멀 상태 실행
if (normalState)
normalState->Update(deltaTime);
}
void SetNormal(const std::string& stateId)
{
IState* next = stateRegistry[stateId].get();
if (!next) return;
if (normalState) normalState->Exit();
normalState = next;
normalState->Enter();
}
void PushInterrupt(const std::string& stateId)
{
IState* next = stateRegistry[stateId].get();
if (!next) return;
if (!interruptStack.empty())
interruptStack.top()->Exit();
interruptStack.push(next);
next->Enter();
}
IState* GetCurrentState()
{
if (!interruptStack.empty()) return interruptStack.top();
return normalState;
}
std::priority_queue<StateRequest> requestQueue;
std::stack<IState*> interruptStack;
IState* normalState = nullptr;
std::unordered_map<std::string, std::unique_ptr<IState>> stateRegistry;
};// 대화 시작
stateMachine.RequestState("Dialogue", StateType::Normal, StatePriority::Medium);
// 선물 건네주기 — 대화 위에 push
stateMachine.RequestState("Gift", StateType::Interrupt, StatePriority::Medium);
// Gift IsDone() → pop → 대화로 자동 복귀고려해야 할 문제들
1. 우선순위 설정은 어떻게 할 것인가
우선순위를 동적으로 넘기는 방식은 유연하지만, 요청하는 쪽이 우선순위를 알아야 한다는 부담이 생긴다. 도구 상태가 움직임 상태에 요청할 때, 도구 상태가 움직임 상태의 우선순위 체계까지 알고 있어야 한다는 건 어색하다.
그렇다고 정적으로 고정하면 상황에 따라 유연하게 대응하기 어렵다.
현실적인 방향은 설계 시점에 우선순위 규칙을 명시적으로 정의해두는 것이다. 예를 들어 상태 ID와 우선순위를 매핑한 테이블을 별도로 관리하고, 요청하는 쪽은 우선순위를 직접 알 필요 없이 상태 ID만 넘기면 스테이트 머신이 테이블을 보고 우선순위를 결정하는 방식이다. 요청자의 부담을 줄이면서도 동적으로 관리할 수 있는 여지를 남길 수 있다.
다만 이 규칙 테이블 자체를 누가 어떻게 관리하느냐는 여전히 설계 시점에 명확히 정해야 할 숙제로 남는다.
2. 동시 요청인가? 대기 요청인가?
전투처럼 즉각 반응이 필요한 케이스와, AI처럼 한 프레임 딜레이가 괜찮은 케이스가 공존한다. 이걸 하나의 방식으로 통일하면 어느 한쪽이 손해를 본다.
그래서 요청을 큐에 넣을 때 대기열 여부를 함께 보내는 방식을 생각해봤다.
- 동시 진행 요청 — 전환 불가 상태에서 flush 대상이 된다. 지금 처리할 수 없으면 버린다.
- 대기열 요청 — flush하지 않고 큐에 남겨둔다. 전환 가능한 상태가 되었을 때 처리된다.
이렇게 하면 요청의 성격에 따라 생존 여부가 결정된다. 피격처럼 지금 당장 반응해야 하는 요청은 동시 진행으로, 퀘스트 완료 후 대화 시작처럼 조건이 갖춰지면 처리해도 되는 요청은 대기열로 보내는 것이다.
cpp
enum class RequestMode
{
Immediate, // 전환 불가 시 flush
Queued // 전환 가능할 때까지 대기
};
struct StateRequest
{
std::string stateId;
StateType type;
StatePriority priority;
RequestMode mode = RequestMode::Immediate;
bool operator<(const StateRequest& other) const
{
return priority < other.priority;
}
};flush 처리:
void ProcessRequests()
{
while (!requestQueue.empty())
{
StateRequest request = requestQueue.top();
requestQueue.pop();
IState* current = GetCurrentState();
if (current && !current->CanTransition())
{
// Immediate 요청만 버리고, Queued는 다시 넣어둠
if (request.mode == RequestMode::Immediate)
continue;
else
{
pendingQueue.push(request);
continue;
}
}
if (request.type == StateType::Interrupt)
PushInterrupt(request.stateId);
else
SetNormal(request.stateId);
}
// 전환 가능해진 시점에 대기 중인 요청 복구
while (!pendingQueue.empty())
{
requestQueue.push(pendingQueue.top());
pendingQueue.pop();
}
}사용 예시:
// 피격 — 지금 당장 처리, 안되면 버림
stateMachine.RequestState("Hit", StateType::Interrupt,
StatePriority::High, RequestMode::Immediate);
// 퀘스트 완료 후 대화 — 조건 갖춰지면 처리
stateMachine.RequestState("QuestDialogue", StateType::Normal,
StatePriority::Low, RequestMode::Queued);결론
플레이어 한정 구조로 보면, 지금 설계는 충분히 실용적이다.
다만 솔직히 Queued 요청의 수명과 유효성 관리, 그리고 우선순위 규칙을 누가 어떻게 정의하느냐는 걱정거리로 남아있다. 구조가 커질수록 이 두 가지가 다시 복잡도를 끌어올릴 가능성이 있다.
그럼에도 이 구조가 흥미로운 이유가 있다. 상태 전환을 요청 기반으로 추상화해뒀기 때문에, 요청을 만들어내는 주체를 바꾸는 것만으로 전혀 다른 가능성이 열린다.
요즘 핫한 AI가 런타임 중에 각 상태에 대한 가중치만을 판단해서 요청을 밀어넣는다면 어떨까. 개발자가 간선을 직접 긋거나 조건을 수동으로 튜닝하는 대신, AI가 상황을 읽고 알아서 적절한 상태를 요청하는 구조가 된다. 스테이트 머신은 그 요청을 받아 처리할 뿐이고.
설계자의 개입은 줄고, 캐릭터는 더 생동감 있게 움직일 수 있다. 지금 구조가 그 가능성을 열어두고 있다는 것만으로도, 충분히 의미 있는 설계라고 생각한다.